 Get in touch
Get in touch

1. PENGENALAN: Dekonstruksi kuasa kuda induksi AC induksi Motor induksi ac adalah salah satu ...
Baca lebih lanjutBerita Industri
2026-04-21
Motor DC (arus terus) menukarkan tenaga elektrik kepada putaran mekanikal menggunakan interaksi antara medan magnet dan konduktor pembawa arus. Prinsip operasi mengikut undang-undang daya Lorentz: apabila arus elektrik mengalir melalui konduktor yang diletakkan di dalam medan magnet, konduktor mengalami daya yang berserenjang dengan kedua-dua arah arus dan arah medan. Susun konduktor pembawa arus yang mencukupi dalam pemasangan berputar dan daya itu menjadi tork putaran berterusan.
Dari segi praktikal, motor DC mengandungi dua sistem magnet asas. The pemegun menyediakan medan magnet pegun — sama ada daripada magnet kekal atau elektromagnet (belitan medan). The pemutar (juga dipanggil angker) membawa konduktor yang disambungkan kepada bekalan kuasa DC luaran. Arus yang mengalir melalui konduktor pemutar bertindak balas dengan medan pemegun untuk menjana tork, memutar pemutar. Selagi voltan DC digunakan, motor akan terus berputar.
Kelajuan dalam motor DC dikawal terutamanya oleh voltan yang digunakan: voltan yang lebih tinggi menghasilkan putaran yang lebih pantas. Keluaran tork adalah berkadar dengan arus angker. Hubungan mudah antara voltan, arus, kelajuan dan tork ini menjadikan motor DC sangat mudah dikawal merentasi julat operasi yang luas — sifat yang menerangkan penguasaan berterusan mereka dalam aplikasi pemacu kelajuan berubah-ubah.
Seni bina dalaman motor DC berbeza-beza antara reka bentuk berus dan tanpa berus, tetapi beberapa komponen teras adalah biasa di kedua-dua jenis.
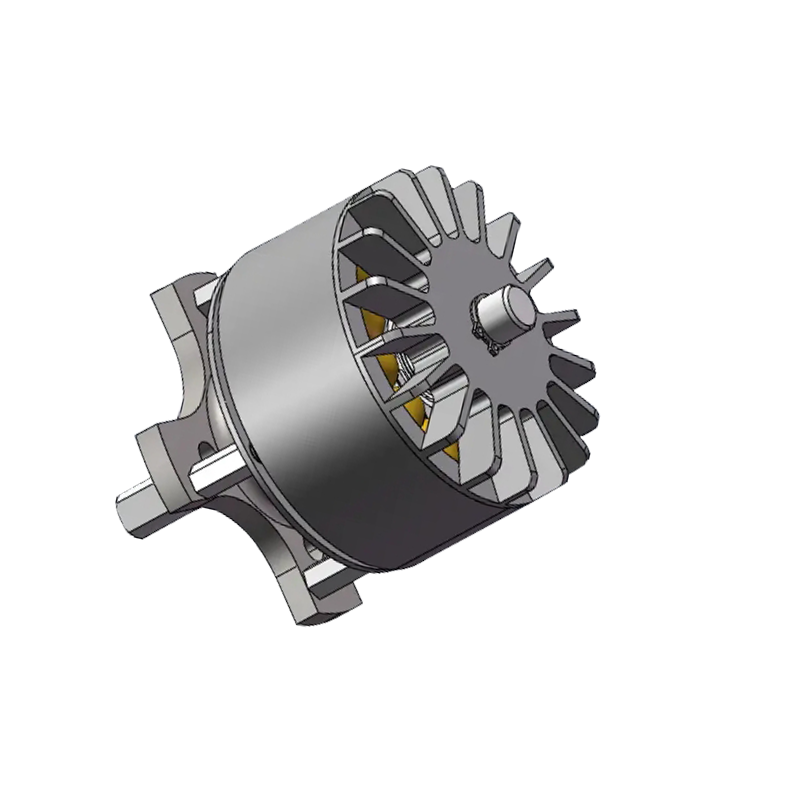
Stator ialah pemasangan luar pegun motor. Dalam motor DC kuasa kuda kecil dan pecahan, medan pemegun dihasilkan oleh magnet kekal yang dilekatkan pada lubang dalam perumah motor. Dalam motor DC industri yang lebih besar, pemegun membawa belitan medan - gegelung dawai yang dililit di sekeliling kepingan tiang - yang melaluinya arus pengujaan DC yang berasingan mengalir untuk mencipta medan magnet. Rangka pemegun lazimnya adalah keluli silikon berlamina untuk meminimumkan kehilangan arus pusar.
Rotor ialah pemasangan berputar yang dipasang pada aci motor. Ia terdiri daripada teras besi berlamina dengan slot dimesin di sekeliling lilitannya, di mana belitan angker dililit. Binaan berlamina mengurangkan kehilangan arus pusar dalam seterika. Dalam motor DC berus pemutar membawa gegelung luka; dalam motor DC tanpa berus pemutar membawa magnet kekal sebaliknya.
Komutator ialah gelang kuprum bersegmen yang dipasang pada aci pemutar. Setiap segmen bersambung kepada gegelung angker yang berbeza. Berus karbon — sesentuh pegas yang dipasang di dalam pemegun — tekan pada permukaan komutator dan kekalkan sentuhan elektrik semasa aci berputar. Apabila pemutar berputar, segmen komutator melepasi di bawah berus mengikut urutan, secara automatik menukar arah semasa dalam setiap gegelung pada masa yang tepat untuk memastikan tork bertindak dalam arah putaran yang konsisten. Pensuisan mekanikal inilah yang mentakrifkan motor DC berus.
Penggulungan angker ialah pengalir kuprum berpenebat yang dililit ke dalam slot pemutar. Konfigurasi belitan — pusingan, gelombang atau simpleks — menentukan bilangan laluan arus selari melalui angker dan mempengaruhi ciri-ciri tork kelajuan motor. Belitan medan pada stator, apabila ada, digulung untuk menghasilkan bilangan kutub magnet yang betul untuk kelajuan reka bentuk dan julat tork.
Aci keluaran menghantar tork mekanikal ke beban. Galas bebola ketepatan atau galas lengan menyokong aci pada setiap hujung perumah, mengekalkan jurang udara antara pemutar dan pemegun dalam toleransi yang ketat. Perumahan (loceng hujung dan bingkai) menyediakan sokongan struktur, melindungi komponen dalaman, dan dalam sesetengah reka bentuk menggabungkan sirip penyejuk atau peruntukan pelekap untuk kipas luaran.
Dalam motor arus terus yang diberus, komutator dan berus melaksanakan fungsi penukar arus secara mekanikal. Semasa angker berputar, segmen komutator bergerak melepasi sesentuh berus pegun, menyambungkan setiap gegelung angker ke bekalan mengikut urutan. Ini memastikan bahawa tanpa mengira kedudukan pemutar, gegelung yang sedang diselaraskan dengan celah kutub stator sentiasa membawa arus ke arah yang betul untuk menghasilkan tork ke hadapan.
Hasilnya ialah motor yang berjalan terus dari bekalan DC tanpa pertukaran elektronik luaran diperlukan. Sambungkan motor DC berus kepada bateri atau bekalan DC terkawal dan ia berputar serta-merta. Terbalikkan kekutuban dan arah terbalik. Kesederhanaan ini adalah sebab utama motor berus kekal digunakan secara meluas dalam aplikasi kerumitan yang sensitif kos, rendah hingga sederhana.
Sentuhan mekanikal antara berus dan komutator memperkenalkan had utama motor. Geseran berus-komutator menghasilkan haba dan serpihan haus, dan lengkokan yang berlaku apabila suis segmen menghasilkan gangguan elektromagnet (EMI). Penggantian berus biasanya diperlukan setiap 1,000–5,000 waktu operasi bergantung pada beban semasa, kelajuan dan persekitaran operasi. Permukaan komutator juga memerlukan pemeriksaan berkala dan penurapan semula.
Motor DC berus tidak sesuai digunakan dalam suasana mudah terbakar atau meletup kerana arka berus boleh menyalakan gas di sekelilingnya. Ia juga dihadkan dalam kelajuan maksimum oleh kekangan mekanikal sentuhan komutator berus, biasanya mendahului pada 3,000–8,000 RPM dalam kebanyakan reka bentuk.

Motor DC tanpa berus (BLDC) menghapuskan pemasangan komutator dan berus sepenuhnya dengan menempatkan semula magnet kekal ke pemutar dan belitan ke stator. Pensuisan semasa — penukaran — dikendalikan secara elektronik oleh pengawal motor yang memantau kedudukan rotor melalui penderia kesan Hall atau pengesanan EMF belakang dan memberi tenaga kepada gegelung stator dalam urutan yang betul untuk mengekalkan putaran.
Penyongsangan seni bina ini mempunyai akibat yang ketara untuk prestasi, penyelenggaraan dan julat aplikasi.
| Ciri | Motor DC Berus | Motor DC tanpa berus |
|---|---|---|
| Kaedah pertukaran | Mekanikal (komutator berus) | Elektronik (penderia pengawal) |
| Kecekapan | 75–85% | 85–95% |
| Penyelenggaraan | Penggantian berus biasa diperlukan | Minimum — galas sahaja |
| Julat kelajuan | Sehingga ~8,000 RPM biasa | Sehingga 100,000 RPM mungkin |
| EMI / arcing | Arka berus yang ketara | Rendah (tiada sentuhan berus) |
| Kesesuaian persekitaran yang berbahaya | Tidak sesuai (berus arka) | Sesuai (tiada arcing) |
| Keperluan pengawal | Kawalan voltan DC mudah | Pengawal elektronik khusus diperlukan |
| Kos seunit | Lebih rendah | Lebih tinggi (pengawal motor) |
| Jangka hayat | Terhad oleh pemakaian berus | Lebih lama — tidak memakai bahagian sentuhan |
Kelebihan kecekapan motor tanpa berus amat ketara dalam aplikasi berkuasa bateri. Pacuan kenderaan elektrik atau alat kuasa yang menjalankan motor BLDC pada kecekapan 92% berbanding setara berus pada 80% diterjemahkan terus kepada masa larian yang lebih lama bagi setiap pengecasan dan mengurangkan beban haba pada pek bateri. Ini adalah pemacu utama di sebalik peralihan hampir universal kepada motor tanpa berus dalam alatan kuasa tanpa wayar, kenderaan elektrik, dron dan sistem HVAC sepanjang dua dekad yang lalu.
Walaupun kelebihan prestasi reka bentuk tanpa berus, motor DC berus kekal sebagai pilihan yang betul dalam beberapa kategori aplikasi.
Pemacu motor DC (juga dipanggil pemacu DC atau pengawal DC) ialah pakej elektronik kuasa yang mengawal voltan dan arus yang dibekalkan kepada motor DC untuk mengawal kelajuan, tork, pecutan dan arahnya. Motor dan pemacu bersama membentuk sistem kawalan gerakan yang lengkap — motor menyediakan output mekanikal, dan pemacu menguruskan input elektrik untuk mencapai profil gerakan yang diingini.
Pemacu DC berus tradisional menggunakan teknik kawalan fasa thyristor (SCR) atau PWM (modulasi lebar nadi) untuk mengawal voltan angker. Pemacu empat kuadran boleh mengawal kelajuan dan tork dalam kedua-dua arah putaran, membolehkan brek penjanaan semula — di mana motor bertindak sebagai penjana semasa nyahpecutan, mengembalikan tenaga kepada bas bekalan. Keupayaan ini digunakan secara meluas dalam aplikasi perindustrian seperti mesin penggulungan, penggulungan dan pengangkat di mana nyahpecutan terkawal dan pemulihan tenaga penting.
Ketepatan peraturan kelajuan pemacu DC berus gelung tertutup dengan isyarat maklum balas takometer biasanya ±0.1% daripada kelajuan yang ditetapkan , yang menerangkan penguasaan lama mereka dalam kawalan gerakan perindustrian ketepatan sebelum pemacu frekuensi boleh ubah AC matang pada 1990-an.
Pengawal motor BLDC melakukan pertukaran elektronik dengan membaca kedudukan rotor — melalui penderia kesan Hall yang tertanam dalam motor atau melalui anggaran belakang-EMF tanpa sensor — dan menukar arus melalui fasa pemegun dalam urutan yang betul. Pengawal juga menguruskan kitaran tugas PWM untuk mengawal kelajuan dan memantau arus untuk mengehadkan tork. Pemacu BLDC yang lebih canggih melaksanakan kawalan berorientasikan medan (FOC), yang mengoptimumkan sudut antara medan pemegun dan magnet pemutar untuk tork maksimum per ampere merentasi julat kelajuan penuh.
Dalam sistem gerakan bersepadu — seperti penyambung robot, paksi servo dan gelendong CNC — motor BLDC dan pemacunya biasanya dipasangkan dan ditala bersama-sama sebagai set yang dipadankan. Parameter pemacu termasuk lebar jalur gelung semasa, perolehan gelung halaju dan pemasaan pertukaran dikonfigurasikan semasa pentauliahan dan disimpan dalam memori tidak meruap pemacu.
Landskap aplikasi untuk motor DC berus dan tanpa berus mencerminkan kekuatan masing-masing dalam kos, penyelenggaraan, julat kelajuan dan ketepatan kawalan.
1. PENGENALAN: Dekonstruksi kuasa kuda induksi AC induksi Motor induksi ac adalah salah satu ...
Baca lebih lanjut1. Pengenalan Dalam Automasi Perindustrian Moden, Pembinaan Pusat Data, Upgr Elektronik Pengguna ...
Baca lebih lanjutStepper Motors mewakili asas kawalan gerakan moden, menawarkan kedudukan yang tepat dan ...
Baca lebih lanjutLandskap Motor Perindustrian sedang menjalani transformasi yang ketara, didorong oleh ...
Baca lebih lanjutProduk berkaitan
Bangunan 10, No.199, Jinfeng Road, Suzhou High-Tech, Wilayah Jiangsu, China
+86-130 1379 7383
+86-512 6876 9967
sean@retekmotion.com
rsgrivic@126.com
 WhatsApp
WhatsApp
Hak cipta © Suzhou Retek Electric Technology Co., Ltd. Semua hak terpelihara. Custom OEM Industrial Multi Rotor Drone Motors Manufacturers













